
 PX4 is an open source drone ecosystem. A group of contributors committed to the transparency and philosophy of open source technology systems. The Dronecode Year in Review report includes metrics on code-writing contributors and a transparent survey of the funding sources and spending of the Dronecode Foundation. “The purpose of the report is to act as a barometer for the open source segment of the drone industry, revealing the work of individual contributors, academic institutions, and the companies that carry it out,” said the foundation.
PX4 is an open source drone ecosystem. A group of contributors committed to the transparency and philosophy of open source technology systems. The Dronecode Year in Review report includes metrics on code-writing contributors and a transparent survey of the funding sources and spending of the Dronecode Foundation. “The purpose of the report is to act as a barometer for the open source segment of the drone industry, revealing the work of individual contributors, academic institutions, and the companies that carry it out,” said the foundation.
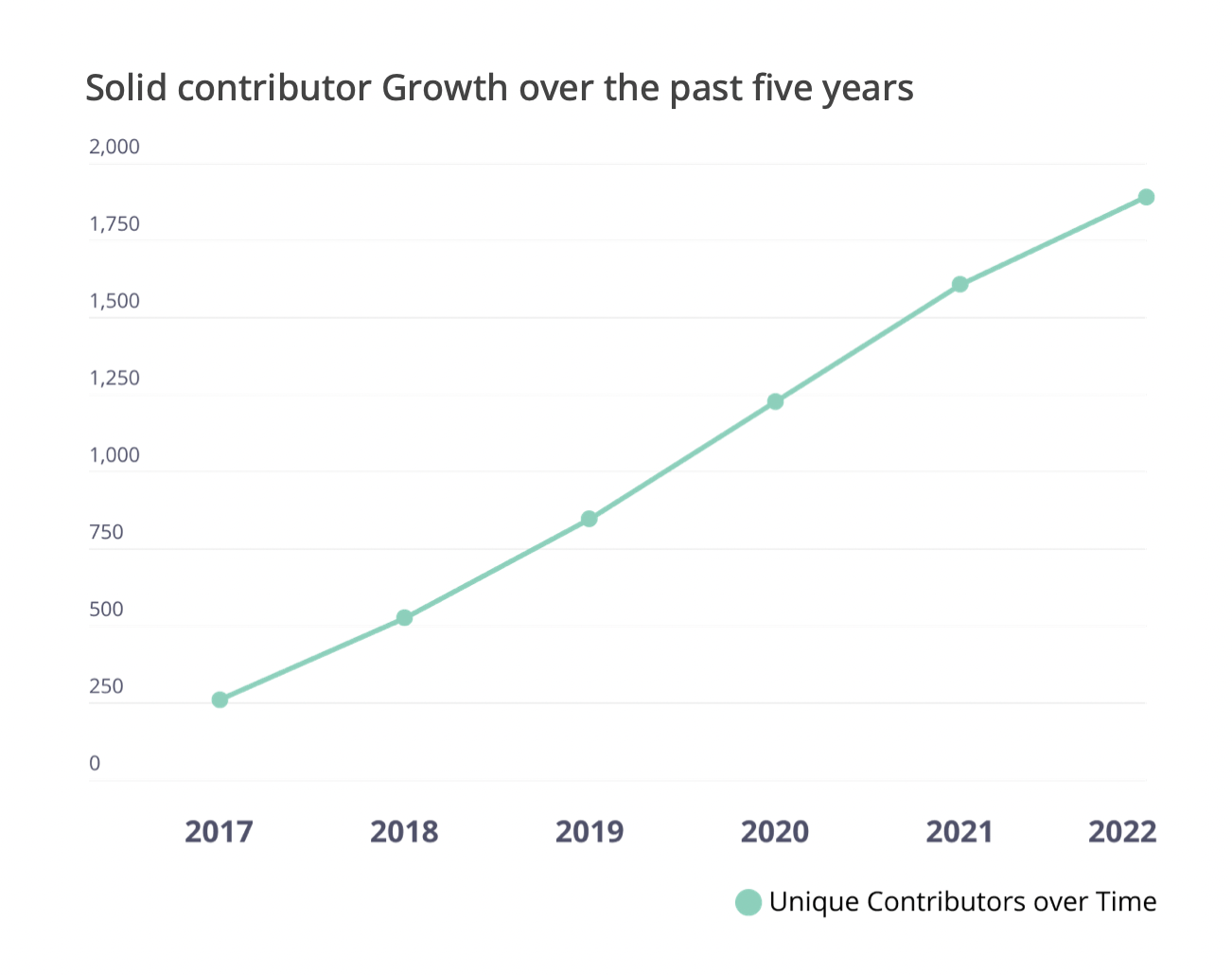
The growth of open source drone platforms
One interesting metric the report provides is information about who is working on the open source drone ecosystem. Outerionis a company headed by PX4 creator Lorenz Meier, who led the contributions. However, the overall pool of contributors has grown dramatically over the past two years.
The growing number of contributors will lead to the growth of open source drones, including aircraft from Watts Innovation, Freefly Systems, Quantum Systems, and Avy. From the report:
pickhawk and PX4 Drone technology is everywhere now. They help create an interoperability ecosystem, giving users more choice and flexibility. Our goal was to build an open drone ecosystem around these technologies, and we’ve finally done it!
“It’s great to see open source drone technology like Pixhawk and PX4 everywhere,” said Auterion co-founder and CEO Lorenz Meier. “We know the power of open collaboration and have seen it work. It means standardizing before things become unmaintainable, so we can share workloads together and help everyone excel.”
of full report It answers questions about how the Dronecode Foundation works and provides links and descriptions to the following projects: PX4 Autopilot, MAVLink, MAVSDK, QGroundControl, and Pixhawk.